粗略的讲,Go 语言中 map 采用的是哈希查找表, 由一个 key 通过哈希函数得到哈希值, 64 位系统中就生成一个 64 bit 的哈希值, 由这个哈希值将 key 对应到不同的桶(bucket)中, 当有多个哈希映射到相同的的桶中时,使用链表解决哈希冲突。
哈希表 #
hash 函数 #
首先要知道的就是 map 中哈希函数的作用,go 中 map 使用 hash 作查找, 就是将 key 作哈希运算,得到一个哈希值,根据哈希值确定 key-value 落在哪个 bucket 的哪个 cell。 golang 使用的 hash 算法和 CPU 有关,如果 CPU 支持 aes,那么使用 aes hash,否则使用 memhash。
数据结构 #
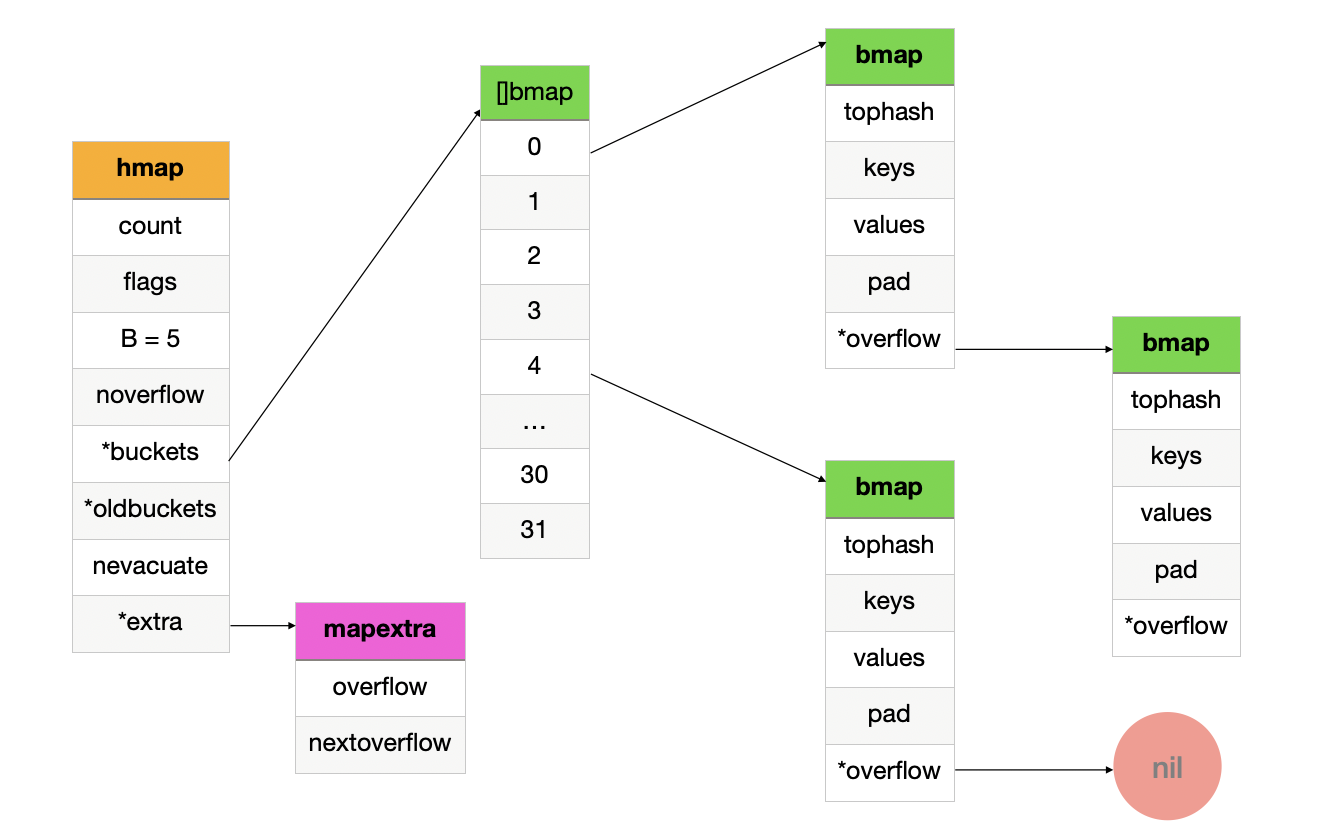
hmap 可以理解为 header of map 的缩写,即 map 数据结构的入口。
type hmap struct {
// map 中的元素个数,必须放在 struct 的第一个位置,因为 内置的 len 函数会从这里读取
count int
// map 状态标识,比如是否在被写或者迁移等,因为 map 不是线程安全的所以操作时需要判断 flags
flags uint8
// log_2 of buckets (最多可以放 loadFactor * 2^B 个元素即 6.5*2^B,再多就要 hashGrow 了)
B uint8
// overflow 的 bucket 的近似数
noverflow uint16
// hash seed,随机哈希种子可以防止哈希碰撞攻击
hash0 uint32
// 存储数据的 buckets 数组的指针, 大小 2^B,如果 count == 0 的话,可能是 nil
buckets unsafe.Pointer
// 一半大小的之前的 bucket 数组,只有在 growing 过程中是非 nil
oldbuckets unsafe.Pointer
// 扩容进度标志,小于此地址的 buckets 已迁移完成。
nevacuate uintptr
// 可以减少 GC 扫描,当 key 和 value 都可以 inline 的时候,就会用这个字段
extra *mapextra // optional fields
}
用 mapextra 来存储 key 和 value 都不是指针类型的 map,并且大小都小于 128 字节,这样可以避免 GC 扫描整个 map。
type mapextra struct {
// 如果 key 和 value 都不包含指针,并且可以被 inline(<=128 字节)
// 使用 extra 来存储 overflow bucket,这样可以避免 GC 扫描整个 map
// 然而 bmap.overflow 也是个指针。这时候我们只能把这些 overflow 的指针
// 都放在 hmap.extra.overflow 和 hmap.extra.oldoverflow 中了
// overflow 包含的是 hmap.buckets 的 overflow 的 bucket
// oldoverflow 包含扩容时的 hmap.oldbuckets 的 overflow 的 bucket
overflow *[]*bmap
oldoverflow *[]*bmap
// 指向空闲的 overflow bucket 的指针
nextOverflow *bmap
}
bmap 可以理解为 buckets of map 的缩写,它就是 map 中 bucket 的本体,即存 key 和 value 数据的“桶”。
type bmap struct {
// tophash 是 hash 值的高 8 位
tophash [bucketCnt]uint8
// 以下字段没有显示定义在 bmap,但是编译时编译器会自动添加
// keys // 每个桶最多可以装 8 个 key
// values // 8 个 key 分别有 8 个 value 一一对应
// overflow pointer // 发生哈希碰撞之后创建的 overflow bucket
}
根据哈希函数将 key 生成一个哈希值,其中低位哈希用来判断桶位置,高位哈希用来确定在桶中哪个 cell。
低位哈希就是哈希值的低 B 位,hmap 结构体中的 B,比如 B 为 5,2^5=32,
即该 map 有 32 个桶,只需要取哈希值的低 5 位就可以确定当前 key-value 落在哪个桶 (bucket) 中;
高位哈希即 tophash,是指哈希值的高 8 bits,根据 tophash 来确定 key 在桶中的位置。
每个桶可以存储 8 对 key-value,存储结构不是 key/value/key/value…,而是 key/key..value/value,
这样可以避免字节对齐时的 padding,节省内存空间。
当不同的 key 根据哈希得到的 tophash 和低位 hash 都一样,发生哈希碰撞,这个时候就体现 overflow pointer 字段的作用了。
桶溢出时,就需要把 key-value 对存储在 overflow bucket(溢出桶),overflow pointer 就是指向 overflow bucket 的指针。
如果 overflow bucket 也溢出了呢?那就再给 overflow bucket 新建一个 overflow bucket,用指针串起来就形成了链式结构,
map 本身有 2^B 个 bucket,只有当发生哈希碰撞后才会在 bucket 后链式增加 overflow bucket。
内存布局 #
扩容 #
-
装填因子是否大于 6.5
装填因子 = 元素个数/桶个数,大于 6.5 时,说明桶快要装满,需要扩容
-
overflow bucket是否太多当 bucket 的数量 < 2^15,但
overflow bucket的数量大于桶数量 当 bucket 的数量 >= 2^15,但overflow bucket的数量大于 2^15
双倍扩容:装载因子多大,直接翻倍,B+1;扩容也不是申请一块内存,立马开始拷贝,每一次访问旧的 buckets 时,就迁移一部分,直到完成,旧 bucket 被 GC 回收。
等量扩容:重新排列,极端情况下,重新排列也解决不了,map 成了链表,性能大大降低,此时哈希种子 hash0 的设置,可以降低此类极端场景的发生。
查找 #
- 根据 key 计算出哈希值
- 根据哈希值低位确定所在 bucket
- 根据哈希值高 8 位确定在 bucket 中的存储位置
- 当前 bucket 未找到则查找对应的
overflow bucket。 - 对应位置有数据则对比完整的哈希值,确定是否是要查找的数据
- 如果当前处于 map 进行了扩容,处于数据搬移状态,则优先从 oldbuckets 查找。
插入 #
- 根据 key 计算出哈希值
- 根据哈希值低位确定所在 bucket
- 根据哈希值高 8 位确定在 bucket 中的存储位置
- 查找该 key 是否存在,已存在则更新,不存在则插入
map 无序 #
map 的本质是散列表,而 map 的增长扩容会导致重新进行散列,这就可能使 map 的遍历结果在扩容前后变得不可靠, Go 设计者为了让大家不依赖遍历的顺序,故意在实现 map 遍历时加入了随机数, 让每次遍历的起点–即起始 bucket 的位置不一样,即不让遍历都从 bucket0 开始, 所以即使未扩容时我们遍历出来的 map 也总是无序的。